25 Maret 2014
![]() DSO's Autonomous Underwater Vehicle (image : Sing Mindef)
DSO's Autonomous Underwater Vehicle (image : Sing Mindef)
DSO National Laboratories develops an Autonomous Underwater Vehicle (AUV) - the Meredith - which can move deep into danger zones to search for underwater mines safely, swiftly and effectively.
Mine hunting operations today are usually done by releasing a remotely operated mine disposal vessel (ROV) tethered to a Mine Counter-Measure Vessel (MCMV).
At all times, an operator controls the ROV, which is equipped with a sonar, to scan for objects in the water. The sonar images are then transmitted through the tether to the MCMV where operators would scrutinise the sonar images for mines.
Because the operating range is limited by the length of the tether, the MCMV has to move further into the suspected mine zone to survey further, posing a greater risk for its sailors and operators.
The unmanned Meredith, however, greatly reduces the risk to ship and crew because it is able to navigate independently without an operator and transmit images back wirelessly.
Highly autonomous
Meredith operators are only needed during its launch and recovery. After the AUV is programmed with waypoints, it can navigate itself along the planned route. This is made possible by a robust set of guidance, navigation and control algorithms developed by DSO.
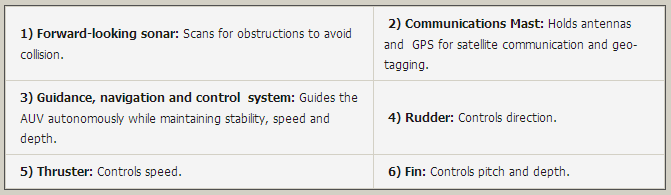
The AUV is equipped with a forward-looking sonar to detect any possible obstructions in its path, and a set of thrusters, stern fins and rudders to control speed, pitch, depth and direction.
The guidance and control algorithms also automatically compensate for any change to the water conditions around it. For instance, it accounts for the speed and direction of waves, so that the AUV can sail with stability - a crucial factor in capturing clear sonar images.
![]()
Just as a pair of shaky hands would cause a camera to capture blurred photos, turbulent water conditions will cause the sonar scanner on the AUV to capture unclear sonar images.
Real-time processing
The Meredith can also be configured to identify mines swiftly by processing the sonar images in real-time using a proprietary Automatic Detection And Classification (ADAC) system to classify objects into "mine" or "non-mine" categories.
This removes the need for manual examination of the sonar images and frees up the operators for other essential tasks.
The algorithm used by the system was developed by DSO scientists who conducted extensive tests to measure the echo characteristics or sonar signatures of various objects in Singapore waters.
The classification results, along with the location of the objects, can be relayed to its operators via satellite.
High-resolution imaging
Conventional sonar scanners work by emitting audio pulses and measuring the echo characteristics of objects in water. As such, its performance is affected by the noisy and shallow sea waters of Singapore where thousands of ships pass through daily.
To overcome this challenge, DSO designed the 5m Meredith to carry a High-Frequency Synthetic Aperture Sonar (HF-SAS) which can capture high-resolution sonar images in Singapore waters.
![]()
The Meredith is one of the world's smallest AUVs to be fitted with the high-end HF-SAS. Commercially available AUVs with similar configurations range from 6 to 10 metres long.
The Meredith's modular structure also allows it to be configured for other types of missions. For instance, it can be paired with a magnetic scanner, which is better for short-distance scanning.
Developmental challenge
DSO research engineers spent over a year prototyping, testing and tweaking the Meredith before successfully conducting its first sea trial in 2012.
One of the challenges faced was integrating the different components of the Meredith to "work together as one piece seamlessly", said research engineer Ng Zhan Ke who worked on the electrical system of the AUV.
For senior research engineer Dr Ong Kai Wei, translating the technology to practical use was his top concern. Hence a self-diagnostic system has been programmed in the AUV to check for any system faults. Operators only need to focus on their mission.
"We wanted to build a system that is simple to use and yet reliable," said Dr Ong. "DSO research engineers are used to plugging in laptops and performing diagnostic checks and troubleshooting. But we can't expect the user to do so."
DSO is currently developing the Meredith AUV for other types of missions.
(Sing Mindef)

DSO National Laboratories develops an Autonomous Underwater Vehicle (AUV) - the Meredith - which can move deep into danger zones to search for underwater mines safely, swiftly and effectively.
Mine hunting operations today are usually done by releasing a remotely operated mine disposal vessel (ROV) tethered to a Mine Counter-Measure Vessel (MCMV).
At all times, an operator controls the ROV, which is equipped with a sonar, to scan for objects in the water. The sonar images are then transmitted through the tether to the MCMV where operators would scrutinise the sonar images for mines.
Because the operating range is limited by the length of the tether, the MCMV has to move further into the suspected mine zone to survey further, posing a greater risk for its sailors and operators.
The unmanned Meredith, however, greatly reduces the risk to ship and crew because it is able to navigate independently without an operator and transmit images back wirelessly.
Highly autonomous
Meredith operators are only needed during its launch and recovery. After the AUV is programmed with waypoints, it can navigate itself along the planned route. This is made possible by a robust set of guidance, navigation and control algorithms developed by DSO.
The AUV is equipped with a forward-looking sonar to detect any possible obstructions in its path, and a set of thrusters, stern fins and rudders to control speed, pitch, depth and direction.
The guidance and control algorithms also automatically compensate for any change to the water conditions around it. For instance, it accounts for the speed and direction of waves, so that the AUV can sail with stability - a crucial factor in capturing clear sonar images.
Just as a pair of shaky hands would cause a camera to capture blurred photos, turbulent water conditions will cause the sonar scanner on the AUV to capture unclear sonar images.
Real-time processing
The Meredith can also be configured to identify mines swiftly by processing the sonar images in real-time using a proprietary Automatic Detection And Classification (ADAC) system to classify objects into "mine" or "non-mine" categories.
This removes the need for manual examination of the sonar images and frees up the operators for other essential tasks.
The algorithm used by the system was developed by DSO scientists who conducted extensive tests to measure the echo characteristics or sonar signatures of various objects in Singapore waters.
The classification results, along with the location of the objects, can be relayed to its operators via satellite.
High-resolution imaging
Conventional sonar scanners work by emitting audio pulses and measuring the echo characteristics of objects in water. As such, its performance is affected by the noisy and shallow sea waters of Singapore where thousands of ships pass through daily.
To overcome this challenge, DSO designed the 5m Meredith to carry a High-Frequency Synthetic Aperture Sonar (HF-SAS) which can capture high-resolution sonar images in Singapore waters.

The Meredith is one of the world's smallest AUVs to be fitted with the high-end HF-SAS. Commercially available AUVs with similar configurations range from 6 to 10 metres long.
The Meredith's modular structure also allows it to be configured for other types of missions. For instance, it can be paired with a magnetic scanner, which is better for short-distance scanning.
Developmental challenge
DSO research engineers spent over a year prototyping, testing and tweaking the Meredith before successfully conducting its first sea trial in 2012.
One of the challenges faced was integrating the different components of the Meredith to "work together as one piece seamlessly", said research engineer Ng Zhan Ke who worked on the electrical system of the AUV.
For senior research engineer Dr Ong Kai Wei, translating the technology to practical use was his top concern. Hence a self-diagnostic system has been programmed in the AUV to check for any system faults. Operators only need to focus on their mission.
"We wanted to build a system that is simple to use and yet reliable," said Dr Ong. "DSO research engineers are used to plugging in laptops and performing diagnostic checks and troubleshooting. But we can't expect the user to do so."
DSO is currently developing the Meredith AUV for other types of missions.
(Sing Mindef)